Forward and Backward Reaching Inverse Kinematics solver based on the paper:
"FABRIK: A fast, iterative solver for the inverse kinematics problem."
Aristidou, A., Lasenby, J. Department of Engineering, University of Cambridge, Cambridge CB2 1PZ, UK.
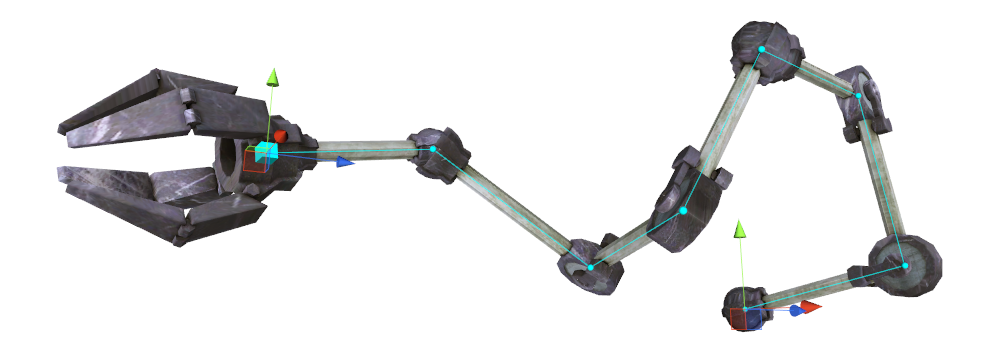
FABRIK is a heuristic solver that can be used with any number of bone segments and rotation limits. It is a method based on forward and backward iterative movements by finding a joint's new position along a line to the next joint. FABRIK proposes to solve the IK problem in position space, instead of the orientation space, therefore it demonstrates less continuity under orientation constraints than CCD, although certain modifications have been made to the constraining method described in the original paper to improve solver stability. It generally takes less iterations to reach the target than CCD, but is slower per iteration especially with rotation limits applied.
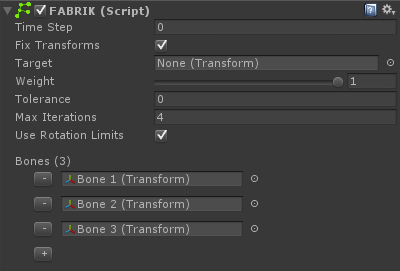
FABRIK is extremely flexible, it even allows for direct manipulation of the bone segments in the scene view and the solver will readapt. Bone lengths can also be changed in runtime. Monitoring and validating the IK chain each frame would be expensive on the performance, therefore changing the bone hierarchy in runtime has to be done by calling SetChain (Transform[] hierarchy) on the solver. SetChain returns true if the hierarchy is valid.
Simply add a Rotation Limit component (RotationLimitAngle, RotationLimitHinge, RotationLimitPolygonal or RotationLimitSpline) to a bone that has been assigned to the "Bones" of the FABRIK component. Note that each rotation limit decreases the stability and continuity of the solver. If FABRIK is unable to solve a highly constrained chain at certain target positions, it is most likely not a bug with FinalIK, but a fundamental handicap of the FABRIK algorithm (remember, no IK algorithm is perfect).
 1.8.4
1.8.4

