Trigonometric IK is the most basic IK solver that is based on the Law of Cosines and solves a 3-segmented bone hierarchy. (IKSolverLimb extends IKSolverTrigonometric just to add a couple of extra parameters like the bend modifiers)
Getting started:
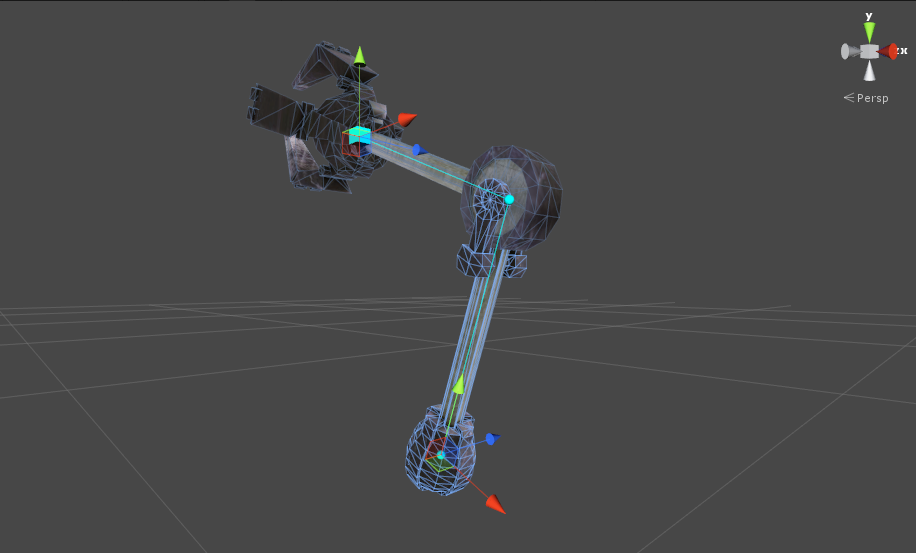
- Add the TrigonometricIK component to the first bone.
- Assign bone1, bone2 and bone3 in the TrigonometricIK component
- Press Play
Getting started with scripting:
public TrigonometricIK trig;
void LateUpdate () {
trig.solver.IKPosition = something;
trig.solver.IKRotation = something;
trig.solver.IKPositionWeight = something;
trig.solver.IKRotationWeight = something;
trig.solver.SetBendGoalPosition(Vector goalPosition);
}
Adding TrigonometricIK in runtime:
- Add the TrigonometricIK component via script
- Call TrigonometricIK.solver.SetChain()
Component variables:
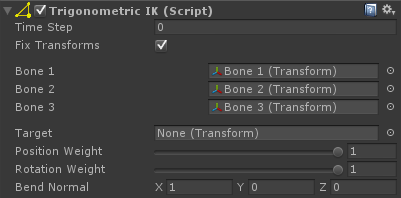
- fixTransforms - if true, will fix all the Transforms used by the solver to their initial state in each Update. This prevents potential problems with unanimated bones and animator culling with a small cost of performance
Solver variables:
- bone1 - the first bone (upper arm or thigh)
- bone2 - the second bone (forearm or calf)
- bone3 - the third bone (hand or foot)
- target - the target Transform. If assigned, solver IKPosition and IKRotation will be automatically set to the position of the target
- positionWeight - the weight of solving to the target position (IKPosition)
- rotationWeight - the weight of solving to the target rotation (IKRotation)
- bendNormal - normal of the plane defined by the positions of the bones. When the limb bends, the second bone will always be positioned somewhere on that plane
Script References:
 1.8.4
1.8.4

