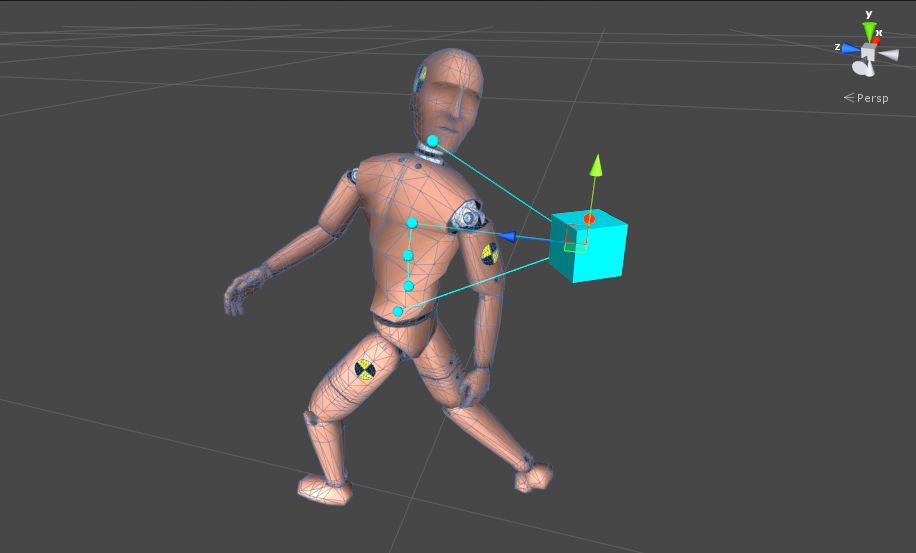
LookAt IK can be used on any character or other hierarchy of bones to rotate a set of bones to face a target.
Note that if LookAtIK does not fit you requirements, you can also use AimIK, that is very similar, but provides a different set of parameters, to make characters (especially non-biped) look at targets.
Getting started:
- Add the LookAtIK component to the root GameObject. That GameObject's forward axis will be the forward direction.
- Assing Spine, head and eye bones to the component.
- Press Play.
Getting started with scripting:
public LookAtIK lookAt;
void LateUpdate () {
lookAt.solver.IKPositionWeight = 1f;
lookAt.solver.IKPosition = something;
lookAt.solver.bodyWeight = 1f;
lookAt.solver.headWeight = 1f;
lookAt.solver.eyesWeight = 1f;
lookAt.solver.clampWeight = 1f;
lookAt.solver.clampWeightHead = 1f;
lookAt.solver.clampWeightEyes = 1f;
}
Adding LookAtIK in runtime:
- Add the LookAtIK component using GameObject.AddComponent().
- Call LookAtIK.solver.SetChain().
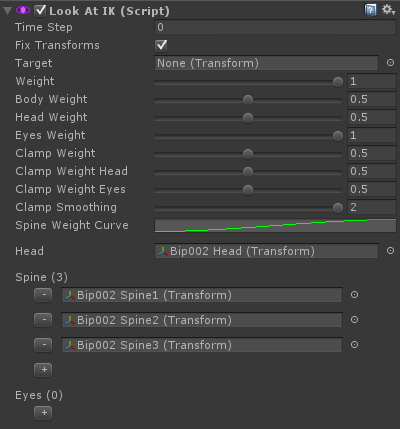
Component variables:
- fixTransforms - if true, will fix all the Transforms used by the solver to their initial state in each Update. This prevents potential problems with unanimated bones and animator culling with a small cost of performance
Solver variables:
- target - the target Transform. If assigned, solver IKPosition will be automatically set to the position of the target
- weight - the master weight of the solver (multiplies all the other weights)
- bodyWeight - the weight of rotating the spine bones
- headWeight - the weight of rotating the head bone
- eyesWeight - the weight of rotating the eye bones
- clampWeight - clamping rotation of the spine bones. 0 is free rotation, 1 is completely clamped to zero effect
- clampWeightHead - clamping rotation of the head bone. 0 is free rotation, 1 is completely clamped to zero effect
- clampWeightEyes - clamping rotation of the eye bones. 0 is free rotation, 1 is completely clamped to zero effect
- clampSmoothing - the number of sine smoothing iterations applied to clamping to make it smoother
- spineWeightCurve - normalized weight distribution between the spine bones. The first spine bone is at "time" 0, the last spine bone is at 1
- head - the head bone
- spine - the spine bones in descending order (parents first), bones can be skipped
- eyes - the eye bones
Script References:
 1.8.4
1.8.4

