Baker is a universal tool for recording Humanoid, Generic and Legacy animation clips. Baker.cs is an abstract base class extended by HumanoidBaker.cs and GenericBaker.cs. Baker allows you to:
Edit animation clips
bake IK into animation
combine animation layers
bake InteractionSystem interactions
bake ragdoll physics
blend ragdoll physics with animation (PuppetMaster)
bake outsourced Humanoid animation to specific character model to avoid using Foot IK for performance
bake motion capture
reduce animation memory footprint with Baker's advanced keyframe reduction tools
Getting started:
Add the HumanoidBaker or GenericBaker component to the same GameObject as your character's Animator.
Click on the button beneath "Save To Folder" to choose a folder for the baked animation clips.
Play the scene.
Click on the bake button.
Animation Clips Mode
AnimationClips mode can be used to bake a batch of AnimationClips directly without the need of setting up an AnimatorController.
Set the Baker to "Animation Clips" mode and add some animation clips to the "Animation Clips" array. "Append Name" is a string that will be added to each clip's name for the saved clip. For example if your animation clip names were 'Idle' and 'Walk', then with '_Baked' as Append Name, the Baker will create 'Idle_Baked' and 'Walk_Baked' animation clips.
Animation States Mode
AnimationStates mode can be used to bake a batch of Mecanim Animation States. This is useful for when you need to set up a more complex rig with layers and AvatarMasks in Mecanim.
Set the Baker to "Animation States" mode and add the Animation State names (only from the base layer) you wish to bake to the "Animation States" array. "Append Name" is a string that will be added to each state's name for the saved clip. For example if your animation state names were 'Idle' and 'Walk', then with '_Baked' as Append Name, the Baker will create 'Idle_Baked' and 'Walk_Baked' animation clips.
Playable Director Mode
Bakes a PlayableDirector with a Timeline asset. Set the Baker to "Playable Director" mode and make sure the GameObject has a valid PlayableDirector.
Realtime Mode
Useful for baking an arbitrary range of animation, such as ragdoll simulation or an InteractionSystem interaction, in real-time.
using RootMotion;
publicclass MyBakingTool {
public Baker baker;
publicfloat bakeDuration = 5f;
void Start()
{
baker.mode = Baker.Mode.Realtime;
StartCoroutine(BakeDuration(bakeDuration));
}
private IEnumerator BakeDuration(float duration)
{
baker.StartBaking();
yield returnnew WaitForSeconds(duration);
baker.StopBaking();
}
}
Keyframe Reduction
While developing a mobile game and running low on RAM, the quality of your animation will suffer a lot should you try to increase the keyframe reduction error thresholds in animation import settings. The most noticable problem will be with the feet starting to float around in idle animations as there are not enough keyframes to make them appear properly planted. Idle animations are also usually the longest and most memory consuming. Unity actually already contains a solution for this problem, but it is simply not implemented in the keyframe reduction options. That solution is the humanoid "Foot IK" system ("Foot IK" toggle in the Animator, previewable by enabling the "IK" toggle in the Animation Preview Window), that is normally used for fixing Humanoid retargeting problems. Foot IK works by storing position and rotation channels of the foot bottoms from the original animation clip, then running a pass of IK on the legs of the retargeted character (that has different leg bone lenghts) to properly plant the feet. Unity keyfame reduction options do not allow you to define different parameters for those IK curves and so they will be reduced just the same as the muscle channels, causing the feet to float even while having "Foot IK" enabled.
Baker allows you define "Key Reduction Error" and "IK Key Reduction Error" separately, hence apply extreme key reduction to muscle channels that take most of the memory while maintaining normal reduction for the IK channels. It also allows you to bake muscle channels at a lower frame rate than the IK channels by increasing the value of "Muscle Frame Rate Div". Those options can help you achieve better animation quality for a memory cost that is multiple times lower. The same technique can be used for hand IK, making sure your 2-handed prop animations do not suffer from keyframe reduction.
Changing AnimationClipSettings
When you first bake an animation clip, Baker will apply the default settings. If you modified the settings of the animation clip manually and baked again, Baker will maintain those modified settings so you will not have to apply them again.
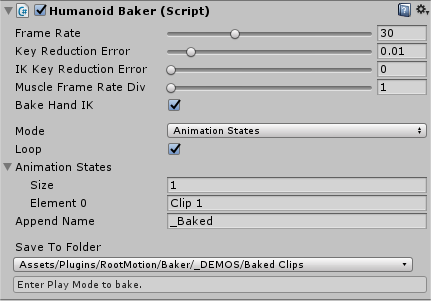
HumanoidBaker variables
frameRate - in AnimationClips, AnimationStates or PlayableDirector mode - the frame rate at which the animation clip will be sampled. In Realtime mode - the frame rate at which the pose will be sampled. With the latter, the frame rate is not guaranteed if the player is not able to reach it.
keyReductionError - maximum allowed error for keyframe reduction.
IKKeyReductionError - max keyframe reduction error for the Root.Q/T, LeftFoot IK and RightFoot IK channels. Having a larger error value for 'Key Reduction Error' and a smaller one for this enables you to optimize clip data size without the floating feet effect by enabling 'Foot IK' in the Animator.
muscleFrameRateDiv - frame rate divider for the muscle curves. If you had 'Frame Rate' set to 30, and this value set to 3, the muscle curves will be baked at 10 fps. Only the Root Q/T and Hand and Foot IK curves will be baked at 30. This enables you to optimize clip data size without the floating feet effect by enabling 'Foot IK' in the Animator.
bakeHandIK - should the hand IK curves be added to the animation? Disable this if the original hand positions are not important when using the clip on another character via Humanoid retargeting.
mode - AnimationClips mode can be used to bake a batch of AnimationClips directly without the need of setting up an AnimatorController. AnimationStates mode is useful for when you need to set up a more complex rig with layers and AvatarMasks in Mecanim. PlayableDirector mode bakes a Timeline. Realtime mode is for continuous baking of gameplay, ragdoll phsysics or PuppetMaster dynamics.
loop - sets the baked animation clip to loop time and matches the last frame keys with the first. Note that when overwriting a previously baked clip, AnimationClipSettings will be copied from the existing clip.
animationClips - AnimationClips to bake.
animationStates - the name of the AnimationStates (must be on the base layer) to bake in the Animator (Right-click on this component header and select 'Find Animation States' to have Baker fill those in automatically, required that state names match with the names of the clips used in them).
appendName - string that will be added to each clip or animation state name for the saved clip. For example if your animation state/clip names were 'Idle' and 'Walk', then with '_Baked' as Append Name, the Baker will create 'Idle_Baked' and 'Walk_Baked' animation clips.
saveToFolder - the folder to save the baked AnimationClips to.
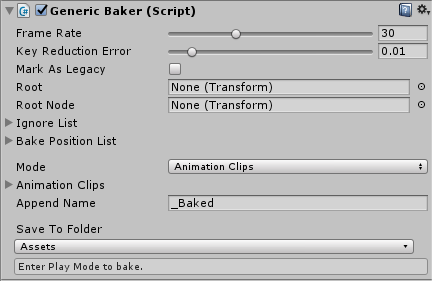
GenericBaker variables
frameRate - in AnimationClips, AnimationStates or PlayableDirector mode - the frame rate at which the animation clip will be sampled. In Realtime mode - the frame rate at which the pose will be sampled. With the latter, the frame rate is not guaranteed if the player is not able to reach it.
keyReductionError - maximum allowed error for keyframe reduction.
markAsLegacy - if true, produced AnimationClips will be marked as Legacy and usable with the Legacy animation system.
root - root Transform of the hierarchy to bake.
rootNode - root node used for root motion.
ignoreList - list of Transforms to ignore, rotation curves will not be baked for these Transforms.
bakePositionList - localPosition curves will be baked for these Transforms only. If you are baking a character, the pelvis bone should be added to this array.
mode - AnimationClips mode can be used to bake a batch of AnimationClips directly without the need of setting up an AnimatorController. AnimationStates mode is useful for when you need to set up a more complex rig with layers and AvatarMasks in Mecanim. PlayableDirector mode bakes a Timeline. Realtime mode is for continuous baking of gameplay, ragdoll phsysics or PuppetMaster dynamics.
loop - sets the baked animation clip to loop time and matches the last frame keys with the first. Note that if you are overwriting a previously baked clip, AnimationClipSettings will be copied from the existing clip.
animationClips - AnimationClips to bake.
animationStates - the name of the AnimationStates (must be on the base layer) to bake in the Animator (Right-click on this component header and select 'Find Animation States' to have Baker fill those in automatically, required that state names match with the names of the clips used in them).
appendName - string that will be added to each clip or animation state name for the saved clip. For example if your animation state/clip names were 'Idle' and 'Walk', then with '_Baked' as Append Name, the Baker will create 'Idle_Baked' and 'Walk_Baked' animation clips.
saveToFolder - the folder to save the baked AnimationClips to.
 1.8.4
1.8.4

